

技术小课堂丨双轴四通道伺服控制系统研究

双轴四通道
伺服控制系统研究
· 简介
本文介绍了双轴四通道伺服控制系统的基本原理,给出了系统的难点、硬件架构、控制原理,并详细阐述了单通道独立控制及多通道原位控制方式。
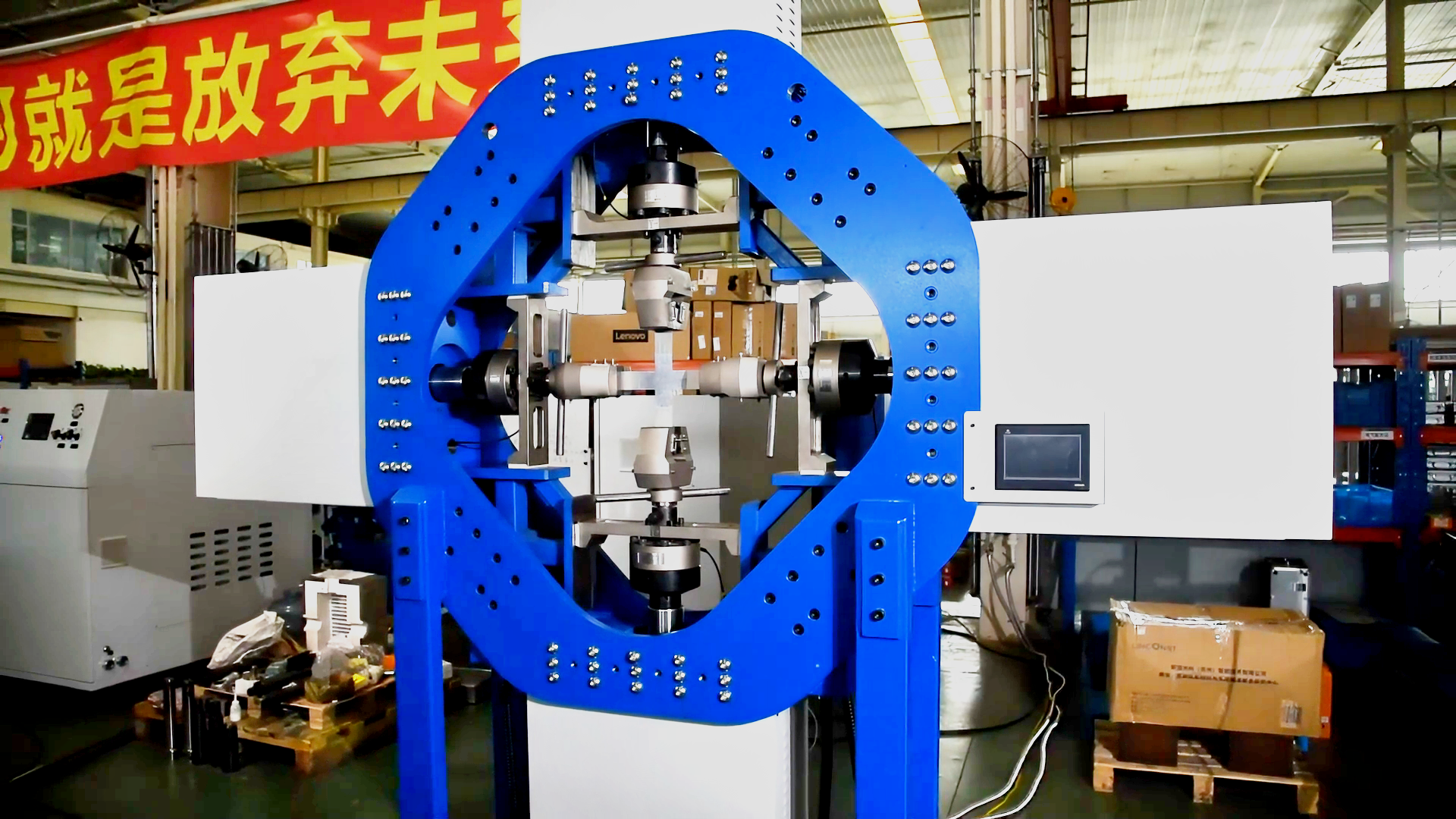
双轴四通道试验系统(如图 1 所示)既可实现多轴同步加载,又可进行单轴独立加载,广泛应用于力学性能测试、工程材料性能测试、构件形变分析等领域。目前,该系统结构主要有伺服电机和液压作动器两种驱动方式。伺服电机控制精度高.适合于小载荷、低频响试验;液压作动器虽然控制精度低于伺服电机.但载荷大,频响高。如果采用静压作动器.4 个通道均可满足 100Hz 以上的试验需求。
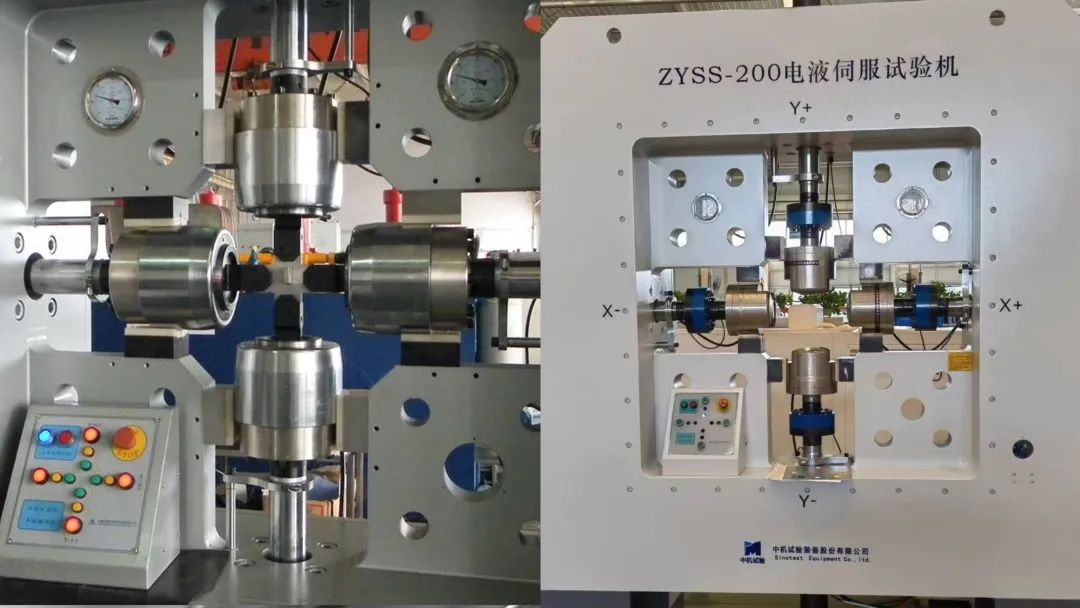
图1 双轴四通道试验系统
双轴四通道伺服控制系统的主要技术难点在于原位控制技术.在多轴同步运行时,确保试样中心点不变,保证X轴及Y轴方向上 4 个驱动器中心定位精度。本文通过对控制系统进行研究.结合上位机和下位机技术特点,对控制器硬件及软件均采用模块化设计.既可实现对伺服电机控制,也可实现对液压作动器的控制。
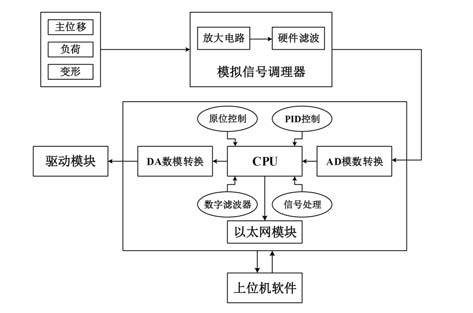
图2 硬件架构框图
国内双轴四通道试验设备的控制系统,早期以模拟电路为主,配合单片机数字采集部分,形成一套完整的控制体系包括放大器、单片机智能采集及函数发生等部分。上位机采用 VB4 平台,通过 RS232 接口向下位机传送命令参数。后期升级为数字控制系统.采用两台计算机,其中一台计算机运行上位机软件,与第一代伺服系统类似:另一台计算机运行 DOS 系统,负责上下位机的接口及多通道任务管理。伺服控制系统由基于两套 PCI 接口的数字控制器组成,每套控制器自带两路伺服控制。两路伺服系统通过 DOS 进行统一管理.进而组成一套完整的双轴四通道伺服控制系统。
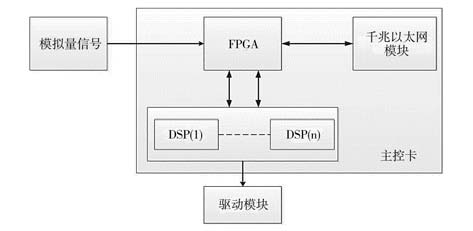
图3 分布式控制框图
本文研究的控制系统在设计上采用国际流行的分布式系统结构,采用FPCA作为中枢接口,结合 TMS320F28335 处理器.共同作为硬件主控模块。驱动部分同样采用模块化设计方式,在不提高成本的基础上,可以兼容伺服电机及液压作动器两种驱动方式。硬件系统主要包括传感器采集、放人部分AD 模数转换部分,主控CPU 及DA数模转换等(如图2 所示)。采用百兆以太网接口方式与上位机进行通信,增强了数据传输的稳定性,也提高了数据传输速度。
测量部分主要包括 4 个负荷传感器4 个主位移传感器及 4个小量程位移传感器。其中,负荷传感器与主位移传感器为两个控制通道,小量程位移传感器的信号主要用于原位控制算法。在试验过程中,为确保足够高的采样频率及控制频率,采用 FPGA作为核心元器件进行高速采集.并将位移负荷及小位移等传感器数据同步传输到DSP中进行计算、处理.最终确保试样中心点的定心精度(如图 3 所示)。
将FPGA作为系统数据缓存、通信与控制中枢,通过EMIF 并行总线连接端口分别控制多个DSP芯片。FPCA实时并行计算实现标准数字信号处理算法的能力远强于DSP。因此,该伺服控制器中,标准数字滤波、数据转换/读取、设备信号保护等功能均在 FPCA 中实现。DSP 用来进行其他复杂信号处理.比如 PIDF 控制算法等。
双轴四通道伺服控制系统既可以实现每个通道独立运行,又可以实现 4 个通道协调加载以进行原位控制。在这两种不同的试验方式中,采用的控制策略也不相同。传统的PID 控制方法因具有简单、可靠,不需要对象的精确数学模型等优点.在工业控制中得到非常广泛的应用。传统 PIDD 控制原理如图 4 所示。
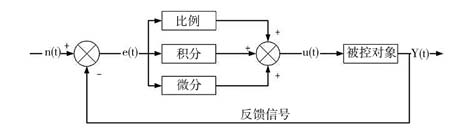
图 4 PID控制原理图
在双轴四通道伺服控制系统中,传统的 PID 控制算法主要用于每个通道独立运行的过程,如试验前试样安装调整以及需要单轴测试的试验等。
当系统采用伺服电机时,由于伺服电机驱动器自带内闭环,因此应用经典 PID 控制方式便可以达到较好的控制效果。当系统采用液压作动器时,由于液压系统的非线性,仅使用传统 PID 控制方式很难达到预期的控制效果。本文采用增加微分负反馈及前馈方式,可以有效增加系统阻尼,减小超调量,同时因为采用前馈补偿.提高了系统的跟踪性能。系统控制原理如图 5 所示,上位机软件也相应地增加了前馈及负反馈参数变量。
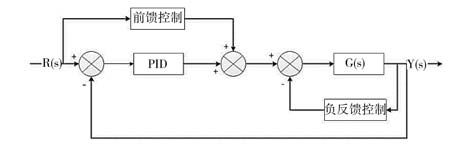
图 5 系统控制原理图
原位控制也可称为定心控制,分为静态与动态两种控制方式。静态方式控制相对简单,对于精度要求不是特别高的情况,通过传统 PID 控制或者上位机软件进行相位补偿就可以达到试验需求。但动态控制过程中,由于频响较高,导致控制精度下降,所以必须在下位机系统中进行实时计算。本文采用增加 4 个小量程、高精度位移传感器测量试验过程中的变形,因此整个系统需要两套闭环控制算法,也就是 X轴和Y轴方向的两套中心点偏差自身形成闭环控制,最终每个通道的被控对象收到的命令就是标准 PID 输出与中心点偏差 PID 输出,原位控制原理如图 6 所示。
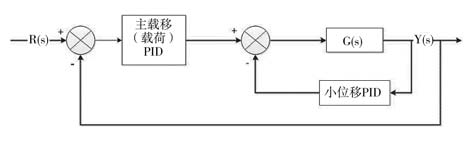
图 6 原位控制原理图
试验中若要保持试样中心点不变,首先要测量中心点的位置。判断中心点位置有两种方式:一是通过主位移传感器,二是每个作动器都配置一个小量程、高精度位移传感器.因为主位移传感器量程大,在变形较小的试验中无法满足测量精度的要求,所以在双轴四通道试验系统的设计中采用第二种方案。双轴四通道试验系统具有 4 个服控制通道.4个通道可分为X轴和Y轴两个方向,每个轴有对称的两个通道。试验过程中.在调节中心点时,要分别确保每个轴的中点不变。

本文针对双轴四通道伺服控制系统进行了研究,全面分析了控制系统的硬件架构及控制原理通过兼容性模块设计方式,可适用于伺服电机驱动及液压作动器驱动。目前.该系统仍存在一定缺陷,如控制参数较多.对于非专业人员来说调试难度较大。多通道试验系统未来的发展,势必会将自适应控制算法融人到控制系统中,以此来减少调试人员的工作难度。此外.增强系统带宽,可以适应更多的试验需求。












请先 登录后发表评论 ~